AUTOMATION & RECORDING
Mapping Formula
This is a full list of supported variables and functions you may use to author expressions for the mapping formula in the Remote Control Settings Dialog.
| + | addition | a+b |
| * | multiplication | a*b |
| - | subtraction | a-b |
| / | division | a/b |
| ^ | power | a^b |
| Sin | sine | Sin(a) |
| Cos | cosine | Cos(a) |
| Tg | tangent | Tg(a) |
| Ctg | cotangent | Ctg(a) |
| Sec | secant | Sec(a) |
| CoSec | cosecant | CoSec(a) |
| ArcSin | antisine | ArcSin(a) |
| ArcCos | anticosine | ArcCos(a) |
| ArcTg | antitangent | ArcTg(a) |
| Exp | exponent | Exp(a) |
| Sqrt | square root | Sqrt(a) |
| Ln | logarithm base e | Ln(a) |
| Log10 | logarithm base 10 | Log10(a) |
| Log2 | logarithm base 2 | Log2(a) |
| Neg | negative | Neg(a) |
| Abs | absolute | Abs(a) |
| Pi | pi | Pi() |
| Sum | sum of arguments | Sum(a,b) |
| Min | minimum | Min(a,b) |
| Max | maximum | Max(a,b) |
| Round | round to nearest integer | Round(a) |
| Int | integral part | Int(a) |
| Frac | fractional part | Frac(a) |
| IfE | returns 1 if a=b | IfE(a,b) |
| IfL | returns 1 if a<b | IfL(a,b) |
| IfG | returns 1 if a>b | IfG(a,b) |
| IfLE | returns 1 if a<=b | IfLE(a,b) |
| IfGE | returns 1 if a>=b | IfGE(a,b) |
| Case | returns b if a=1, else returns c | Case(a,b,c) |
| Input | value sent by the controller (MIDI or internal) | Input |
| Tension | the same as the tension knobs | Tension(Value,Speed) |
Examples
Enter a custom formula to alter the default 1:1 mapping. For example: 'Input*2' multiplies the controller value by 2. After you enter an expression, press Enter. If you see message "Compiled OK" the formula was successfully compiled and you can press the OK button to apply it to the linked control. If a red text appears below, the formula is wrong (usually syntax error or unsupported variable/function was used). Correct the error and press Enter again.
| Example Formula | Result |
|---|---|
| 1-Min(Round(Input*2),1) |  |
| ifg(input,0.25)+ifl(input,0.5)-1 |
 |
| ifg(input,0.5)+ifl(input,0.75)-1 |
 |
| Max(Round(Input*2),1)-1 |
 |
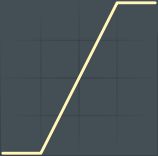
| int(Input*9)/8 |
 |
| Input*2-1 |
 |
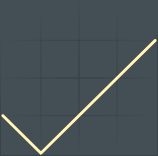
| 1-(Max(Input,0.5)- Min(Input,0.5))*2 |
 |
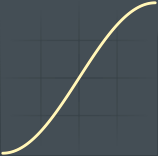
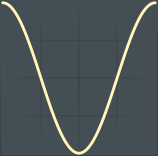
| 1-Cos(Input*Pi)*0.5-0.5 |
 |
| Max(Input,0.25)-Min(Input,0.25) |
 |
| Max(Input,1)-Min(Input,0.5) |
 |
| Max(Min(Input,0.75),0.5) |
 |
| Max(Min(Input+0.25,1),0.5)*2-1 |
 |
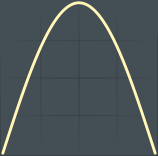
| Sin(Input*Pi) |
 |
| Sin(Pi*0.5-Input*Pi*2)*0.5+0.5 |
 |
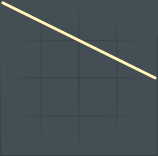
| 1-Input*0.5-0.5 |
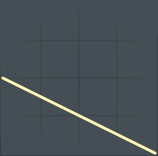 |
| 1-Input*0.5 |
 |
User Defined Formula Menu
To add custom formula in the Formula Menu - Edit the Formulas.txt file in the FL Studio installation folder. Windows: ..\Image-Line\FL Studio\System\Config\Mapping, Mac: ../Applications/FL Studio 20.app/Contents/Resources/FL/System/Config/Mapping/Formulas.txt. The format is the preset name followed by th : character, then the formula. For example: Up and down smooth:Sin(Input*Pi)